
Nearly 420 people drowned in 2019, according to the German Lifesaving Association DLRG. Most of them lost their lives in inland waters. But there were also fatal accidents in swimming pools. One reason for this is the lack of trained lifeguards to keep pools safe - all over Germany. The DLRG also lacks young lifeguards. A team of researchers from Fraunhofer IOSB's Institute for Applied Systems Technology AST wants to remedy the situation. A globally unique water robot is to assist lifeguards and lifeguards and save swimmers in distress. In developing the autonomous system, the scientists are drawing on their years of expertise in underwater robotics. With DEDAVE, they have already developed a multi-award-winning autonomous underwater vehicle.
"There are typical body positions by which you can tell that someone is in danger," explains computer scientist Helge Renkewitz, who led the completed project in close collaboration with the Wasserrettungsdienst Halle e.V. water rescue service. The project was funded by the German Federal Ministry for Economic Affairs and Energy BMWi. Surveillance cameras mounted on the ceiling of the hall register the movement patterns and position of the drowning victim in the pool and send the coordinates to the robot. The robot, protected from outside eyes, is located in a docking station at the bottom of the pool, which opens in an emergency. Once the vehicle has reached its destination, it uses cameras to locate the person in danger and transports them to the surface of the water. A fixation and catching device prevents lifeless bodies from sliding down as they rise to the surface. This device can also be mounted on other underwater vehicles.
Tests in open water successfully completed
At swimming lakes, aerial drones and zeppelin systems are taking over the role of surveillance cameras. "These drones and advertising balloons can easily be equipped with cameras," says Renkewitz. For rescues in swimming lakes where the water is murky, the underwater vehicle must be equipped with acoustic sensors instead of optical ones. With the help of the echo of the sound waves, the position and orientation of people can be determined so precisely that the robot can autonomously navigate to and pick up the target person.
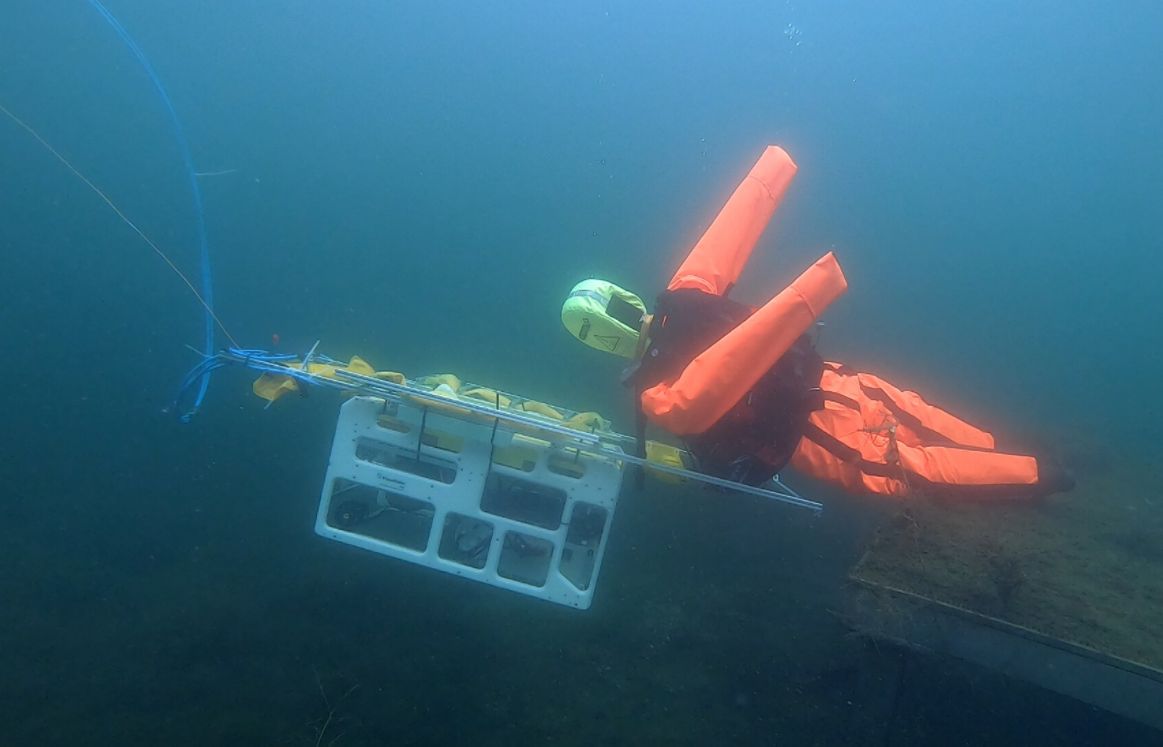
The researchers were able to impressively demonstrate that this works perfectly in practice in open-water tests in the Hufeisensee lake near Halle (Saale): A dummy weighing 80 kilograms that had been lowered to a depth of three meters was picked up by the rescue robot, fixed in place, brought to the surface within a second and returned by the shortest route a distance of 40 meters to the shore, where the rescue forces were already waiting. A signal alerted them immediately when the robot was informed of an emergency. "The complete rescue operation took a good two minutes. Casualties must be resuscitated within five minutes to rule out permanent damage. We were able to meet this critical time span without any problems," says Renkewitz.

