Die Forschungsplattform bietet uns und unseren Partnern die Möglichkeit, innovative Hard- und Software für Unterwasserfahrzeuge und -komponenten zu entwickeln.
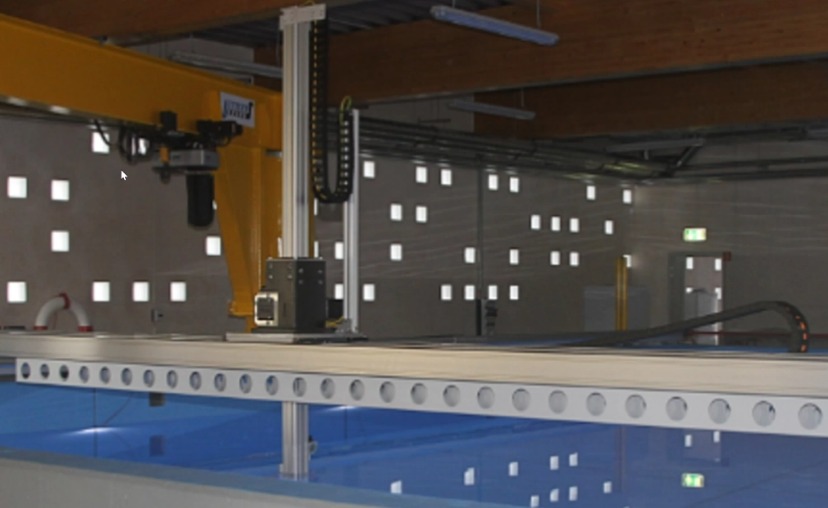
Ein zentrales Element dieser Plattform ist ein Testbecken, in dem verschiedene Objekte, wie Schad- und Spundwände, platziert werden können. Über dem Testbecken befindet sich ein Portalkran, der die Evaluierung von Sensoren und Aktoren mittels reproduzierbarer 3D-Bewegungstrajektorien ermöglicht.
Darüber hinaus verfügt die Forschungsplattform über eine spezielle Druckprüfanlage, mit der Baugruppen vor ihrem Einsatz in Talsperren oder Ozeanen hinsichtlich Dichtigkeit und Druckstabilität getestet werden können. Besonders hervorzuheben ist, dass die Komponenten während des Betriebs durch Schnittstellen für Strom- und Datenübertragung überprüft werden können.
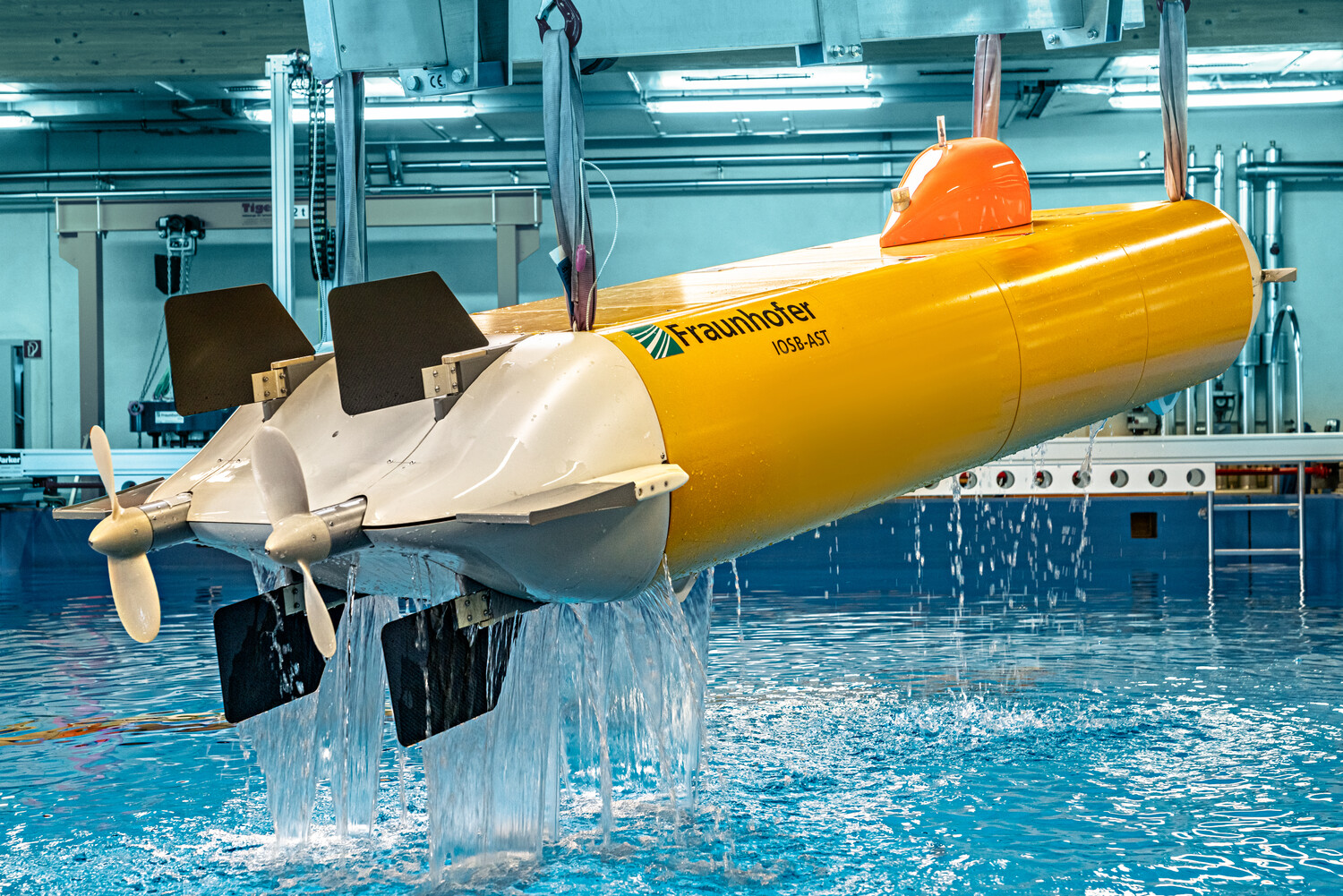
Für Projekte stehen eine Vielzahl von Sensoren, Aktoren und Komponenten für Unterwasserfahrzeuge zur Verfügung, ebenso wie vollständig einsatzfähige ROVs (Remote Operated Vehicles) und AUVs (Autonomous Underwater Vehicles).
Im Maritimen Labor werden druckneutrale Elektronikkomponenten entwickelt und getestet, Komponenten integriert sowie 3D-Druck-Komponenten aus verschiedenen Materialien schnell hergestellt.